I graduated magna cum laude from Drexel University with a bachelor of science in mechanical engineering.
During my senior year, I led projects focusing on electromechanical systems and mechanics of materials.

I studied at the Technical University of Denmark in the Fall of my junior year, where my coursework focused on microfabrication, structural analysis, and 3D CAD.
Stair Climbing Wheelchair Platform
My senior design project at Drexel University was to develop and fabricate a device that enabled conventional wheelchairs to ascend / descend stairs unassisted. The project consisted of three phases over the course of an academic year: concept generation, prototyping, and design validation.
Serving as mechanical design lead in a team of five students, I created the 3D model of the full-scale device, animated the device in a virtual home environment, and assisted in fabricating a 1/4 scale prototype to prove concept viability.
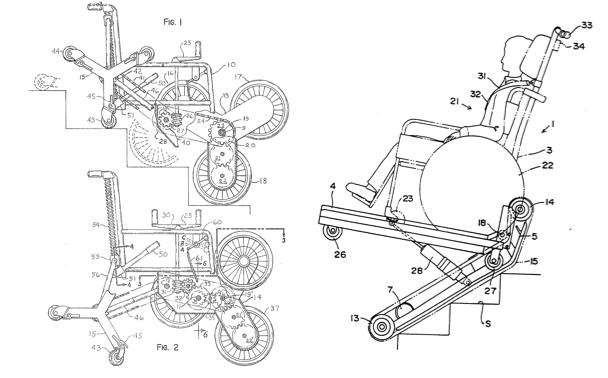
Existing patent example
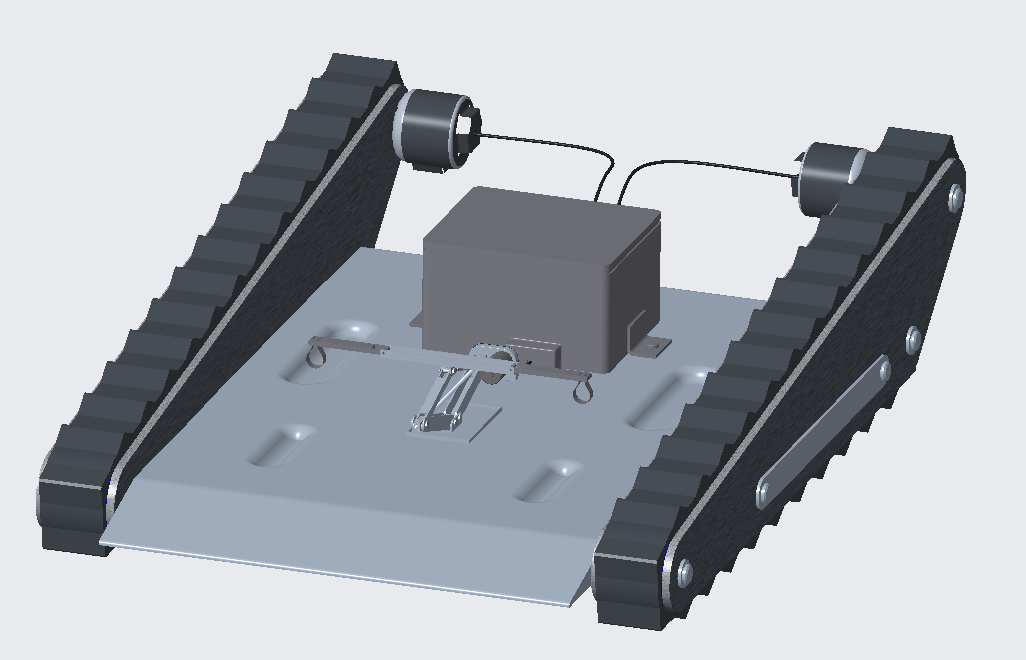
Full scale device
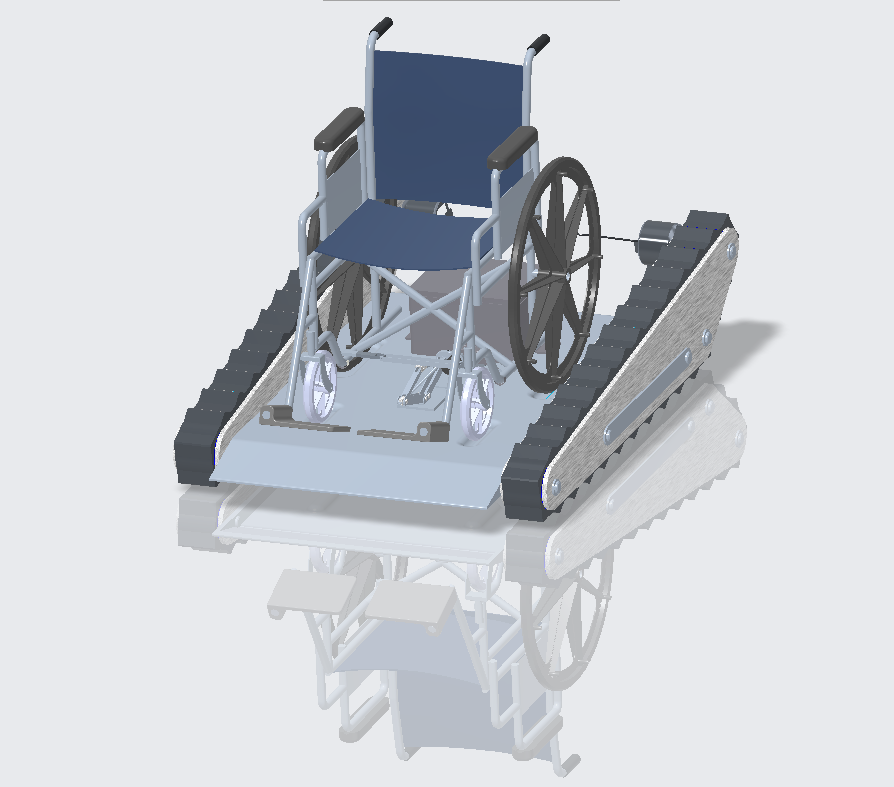
Complete device with chair
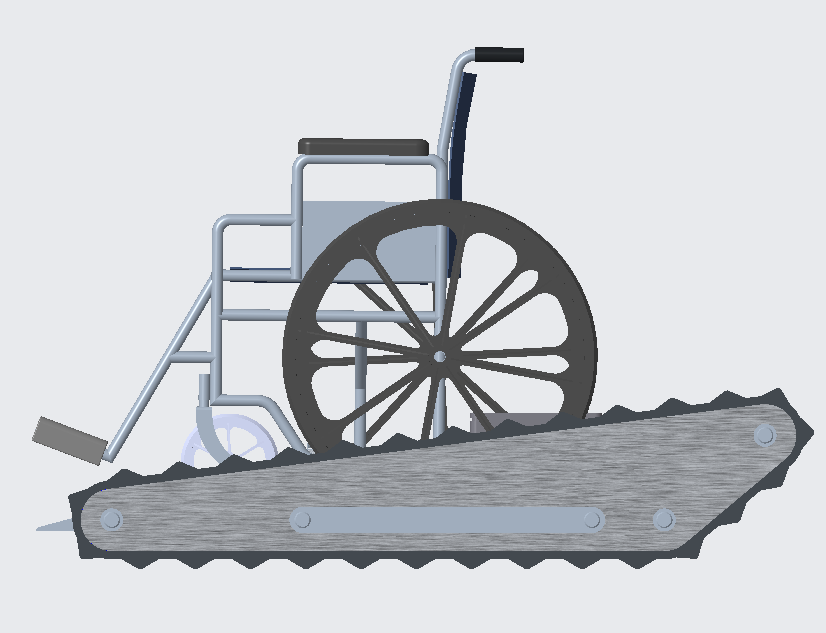
Complete device side view
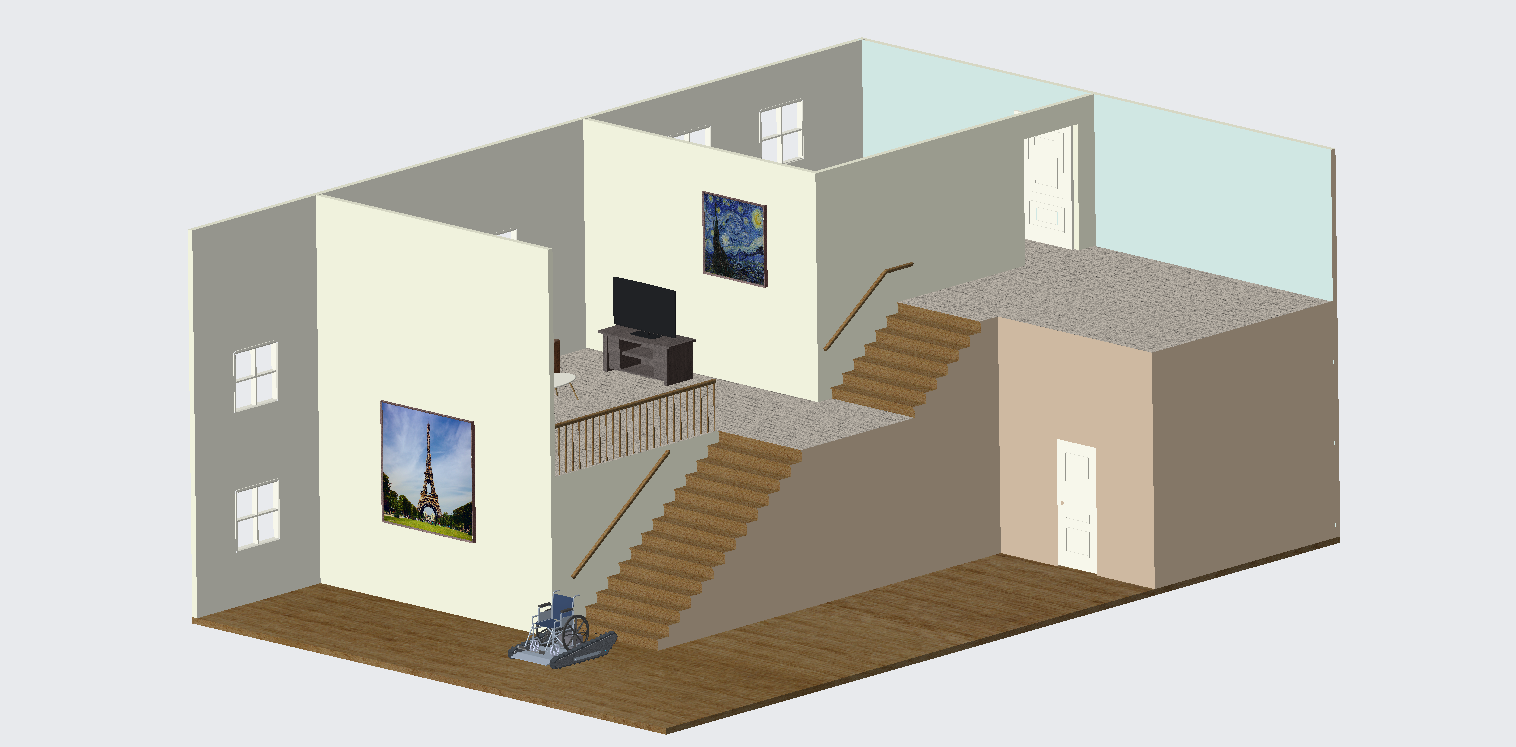
Simulated home environment
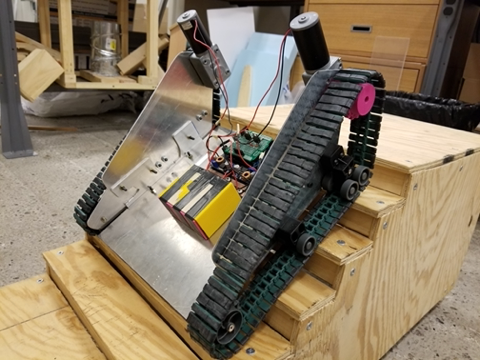
Final prototype
Our team started the project by conducting a competitive analysis of existing stair climbing technologies and ideating through concepts to generate a novel solution. We also defined our key stakeholders as existing wheelchair users, healthcare professionals, and owners of public infrastructure.
We used our design criteria of safety, durability, simplicity of operation, user comfort, and wheelchair accessibility to down-select to a motorized treads and platform concept.
I developed all 3D models for our device, and created a virtual home environment in parallel to simulate product functionality. The key advantages of our device included a compact tilt control system and having the wheelchair completely separate from the device. I also animated the device operating throughout the virtual home to demonstrate these capabilities to the review committee.
Our team's final deliverable was a 1:4 scale prototype consisting of aluminum framing, motorized treads with a 3D-printed pulley system, 18650 lithium ion batteries, and on-board Arduino. The device was successfully able to ascend and descend a scale set of stairs, and provided valuable insight for improvements to tread motor control and wheelchair tilt functionality.
Guitar Vibration Analysis
This project for my mechanics of vibration course was an analysis of a multi-degree of freedom system using the lumped mass method. The goal was to generate accurate sound responses from input frequencies to a model of a musical instrument.
I selected a dreadnought guitar with a sitka spruce wood top, and generated the program in MATLAB. The result was a dynamic simulation of vibration responses, which were then captured in sound files.
For the guitar model, I generated a .GIF image to represent the instrument form in pixels, with colors to differentiate components such as the top body (black), sound hole (red), bridge (blue), and frequency input location (green). My program decoded the boundaries of the image and designated material properties to each section (modulus of elasticity, density, bending constant). Physical properties of the wood such as anisotropicity, damping, and stiffness were also accounted for.

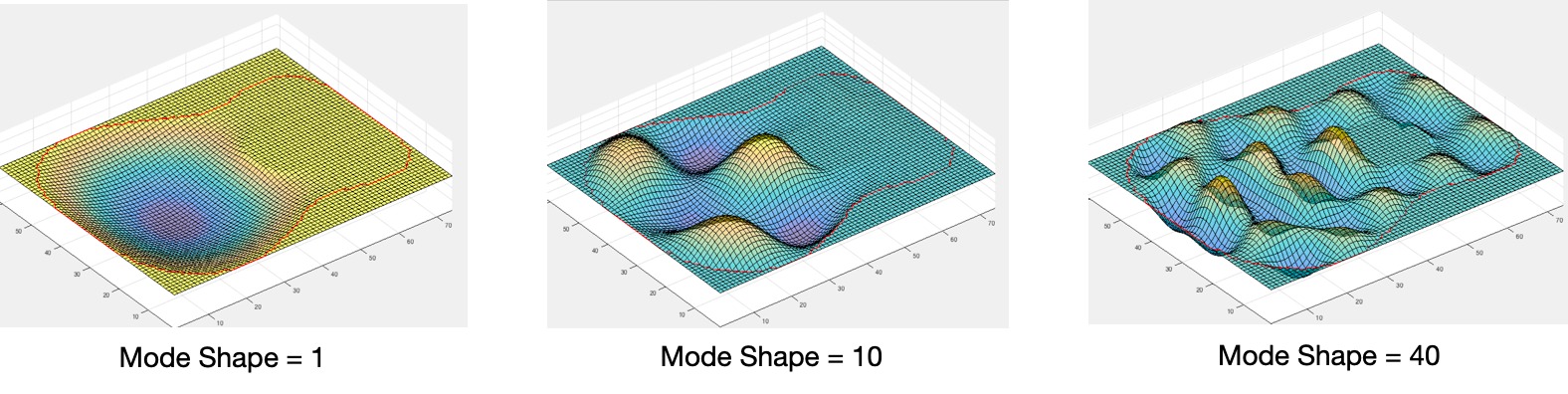
By calculating the aggregate vertical motion of each mass element, my program replicated the vibration response of the instrument top at specific natural frequencies (i.e. harmonic resonance / mode shapes).
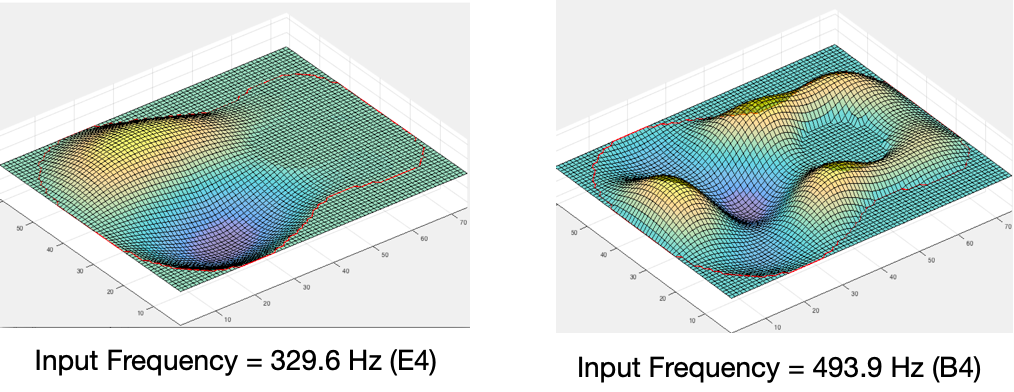
It also showed the vibration response to specific "forced input" frequencies, which simulated a plucked string vibrating in contract with the bridge.